·ўІјК±јдЈє2020-09-23 ЧчХЯЈєЅЛХУЕДбО¬МШЦЗДЬЧ°±ёУРПЮ№«Лѕ µг»чґОКэЈє313
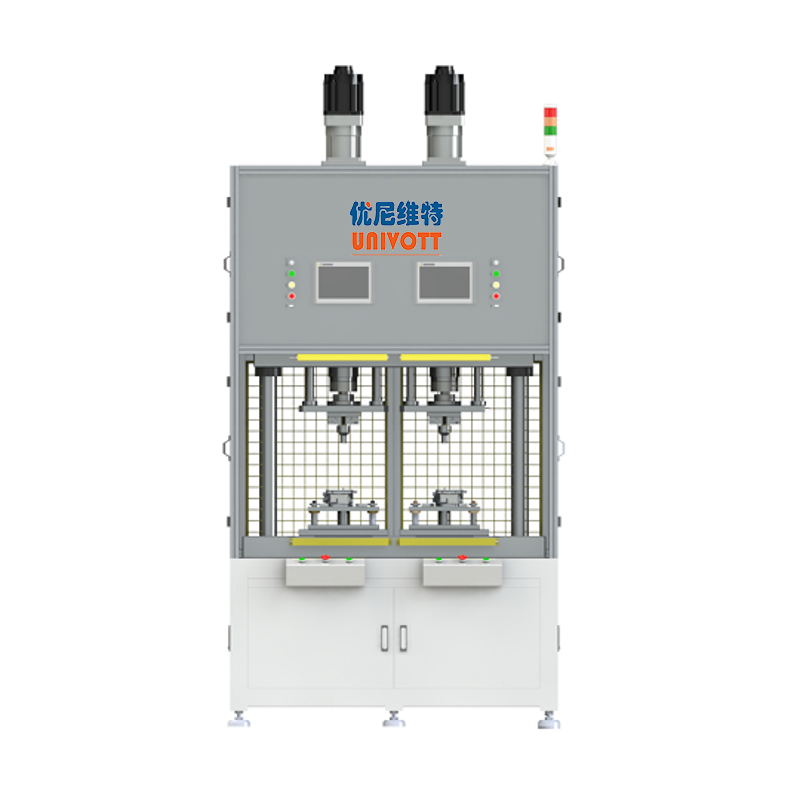
»ъЖчИЛЧФ¶ЇЧ°ЕдКЗµ±Ѕс»ъЖчИЛјјКх·ўХ№єНУ¦УГµДТ»ёцК®·ЦЦШТЄµД·ЅГж,ТІКЗјЇФјЎь»Ї,ИбРФ»ЇЧФ¶ЇЧ°ЕдµД·ўХ№·ЅПт,№ъјКЙПТСЅшИлЎыКµУГ»ЇЅЧ¶ОЎЈ№г·єУ¦УГУЪЖыіµІїЁЋјю,µз»ъµзЖч,»ъЖчИЛ,јТУГµзЖч,ЦУ±н,С№Лх»ъµИЦЪ¶аРРТµ,ѕЯУРѕЮґуµДКРіЎРиЗуєН·ўХ№З°ѕ°ЎЈіЈУГµДЧ°Ед»ъЖчЁuИЛЦчТЄУРїЙ±аіМНЁУГЧ°ЕдІЩЧчКЦјґ PUMA »ъЖчИЛєНЖЅГжЛ«№ШЅЪРН»ъЖчИЛјґSCARA»ъЖчЎъИЛБЅЦЦАаРНЎЈУлТ»°г№¤Тµ»ъЖчИЛ©IЎЎПа±ИЈ¬Ч°Ед…e»ъЖчИЛѕЯУРѕ«¶ИёЯЎўИбЛіРФєГЎў№¤Чч·¶О§ЎсРЎЎўДЬУлЖдЛыПµНіЕдМЧК№УГЎфµИМШµгЈ¬ЦчТЄУГУЪёчЦЦµзЖчµДЦЖФмРРТµЎЈ
»ъЖчИЛЧФ¶ЇЧ°ЕдУЙ»ъЖчИЛЁLІЩЧч»ъЎўїШЦЖЖчЎўД©¶ЛЦґРРЖчєНґ«ёРПµНіЧйіЙЎЈЖдЦРІЩЧч»ъµДЅб№№АаРНУРЎЗЛ®ЖЅ№ШЅЪРНЎўЦ±ЅЗЁ‘Чш±кРНЎў¶а№ШЅЪРН¦· єНФІЦщЧш±кРНµИЈ»їШЦЖЖчТ»ЁЏ°гІЙУГ¶аCPU»т¶ај¶јЖЛг»ъПµНіЈ¬КµЎэПЦФЛ¶ЇїШЦЖєНФЛ¶Ї±аіМЈ»Д©¶ЛЦґРРЖчОЄККУ¦І»Н¬µДЧ°Ед¶ФПу¶шЙијЖіЙёчЦЦКЦЧ¦єНКЦНуµИЈ»ґ«ёРПµНіУГАґ»сИЎЧ°Ед»ъЖчИЛУлЎЮ»·ѕієНЧ°Ед¶ФПуЦ®јдП໥ЧчУГµДРЕПўЎЈЧ°Ед»ъЖчИЛµДґуБїЧчТµКЗЦбУлїЧµДЧ°ЕдЈ¬ОЄБЛФЪЦбУлїЧґжФЪОуІоЁ‘µДЗйїцПВЅшРРЧ°ЕдЈ¬У¦К№»ъЖчИЛѕЯУРИбЛіРФЎЈ